






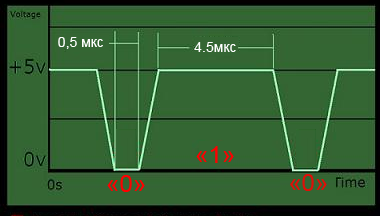
Наиболее распространенным протоколом на текущий момент является «шаг-направление»(варианты названия: STEP/DIR, PULSE/DIR, PUL/DIR, CP/DIR). Некоторые hi-end станки используют собственные проприетарные цифровые или аналоговые протоколы, но как правило, это все равно вариации на тему формата STEP/DIR. Данные сигналы генерируются контроллером(в роли которого часто выступает компьютер) при выполнении управляющей программы на высокоуровневом языке(обычно G-код). Название протокола STEP/DIR говорит само за себя — привод с ЧПУ получает команду из двух частей. Одна часть предписывает приводу сделать шаг, вторая часть говорит, в каком направлении шаг должен быть сделан. На физическом уровне сигналы представляют собой прямоугольные импульсы амплитудой 5 В, которые, например, могут генерироваться компьютером на контактах LPT-порта(часто такие сигналы называюют ТТЛ-совместимыми сигналами). Т.е. управляющие сигналы для привода выглядят как последовательность чередующихся уровней напряжения 0 В и +5В, представляющих логические 0 и 1 соответственно. Сигнал такого рода явлется разновидностью ШИМ-сигнала, в котором ширина импульса интерпретируется драйвером как 0 или 1. Поскольку все драйверы и контроллеры разные, очень важно понимать как работает протокол STEP/DIR. Рассмотрим на примере популярного драйвера шагового двигателя Geckodrive G201. В руководстве сказано, что минимальная длительность логической 1 канала STEP — 4мкс, а логического 0 — 0.5 мкс. Посмотрим на картинку справа: там изображен сигнал, соответствующий минимальным требованиям. Аналогичные требования указаны и для сигнала направления, только минимальная длительность уже будет 1 мкс. Если входящие сигналы будут удовлетворять указанным требованиям, то при поступлении каждой логической единицы по каналу STEP драйвер распознает её и сделает шаг, тогда как состояние канала DIR в этот момент задаст направление шага(1 — по, 0 — против часовой стрелки, или наоборот). Сигналы «шаг» и «направление» посылаются одновременно. Если движения в настоящий момент нет, на канал STEP будет подаваться 0, а DIR обычно меняет уровень сигнала только при смене направления.
Почему знать это важно? Дело в том, что у множества дешевых моделей безымянных производителей заявлены такие же характеристики, что и у hi-end моделей, кроме максимальной входной частоты. G201 способен обработать входящие сигналы STEP с частотой 200 кГц, что является весьма неплохим показателем. Во многих случаях, если используется большое деление шага, частоты STEP могут быть очень высокими, и надо понимать, какой драйвер сможет их отработать, а какой спасует гораздо раньше. Конечно, скорее всего, Вам не понадобятся глубокие знания о протоколах управления приводами с ЧПУ, если только вы не планируете собрать драйверы собственноручно, но понимание принципов пригодится при решении разнообразных проблем со станком.
В статье использованы материалы с сайта Darxton.ru